通过本篇文章,你可以了解到:
1 java中的锁实际是基于AQS来进行实现的。
2 AQS内部的数据结构
3 独占式同步状态的获取与释放
4 共享式同步状态的获取与释放一些概念
- 如果对于CAS,自旋锁不了解,麻烦去上一篇《java自旋锁》.
简单理解
队列同步器本质上是在多线程获取锁的时候,如果获取锁失败,那么就将线程以节点的方式放进AQS内部的FIFO(双向队列)队列中,并且轮询前驱节点是否是head,如果是head则表示该节点获取到了锁。反之则表示获取到了锁。释放:当前节点释放了之后,将本节点从队列中移除。将下一节点的prev指向head.
从一个独占式锁示例代码开始
下面这段代码是实现了一个独占式锁。并创建了了一个类有读和写功能
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158package concurrent.lock;
import java.util.concurrent.TimeUnit;
import java.util.concurrent.locks.AbstractQueuedSynchronizer;
import java.util.concurrent.locks.Condition;
import java.util.concurrent.locks.Lock;
/**
* Created by louxiu
*/
public class Mutex implements Lock {
private static class Sync extends AbstractQueuedSynchronizer {
protected boolean isHeldExclusively() {
return getState() == 1;
}
public boolean tryAcquire(int acquire) {
if (compareAndSetState(0, 1)) {
setExclusiveOwnerThread(Thread.currentThread());
return true;
}
return false;
}
public boolean tryRelease(int release) {
if (getState() == 0) throw new IllegalMonitorStateException();
setExclusiveOwnerThread(null);
setState(0);
return true;
}
Condition newCondition() {
return new ConditionObject();
}
}
private final Sync sync = new Sync();
public void lock() {
sync.acquire(1);
}
public void lockInterruptibly() throws InterruptedException {
sync.acquireInterruptibly(1);
}
public boolean tryLock() {
return sync.tryAcquire(1);
}
public boolean tryLock(long time, TimeUnit unit) throws InterruptedException {
return sync.tryAcquireNanos(1, unit.toNanos(time));
}
public void unlock() {
sync.release(1);
}
public Condition newCondition() {
return sync.newCondition();
}
public static void main(String[] args) throws InstantiationException, IllegalAccessException, InterruptedException {
Mutex mutex = new Mutex();
// Thread x = ObjectLock.class.newInstance();
// x.start();
Thread t1 = mutex.new FuncLock2(false, mutex);
Thread t2 = mutex.new FuncLock2(true, mutex);
Thread t3 = mutex.new FuncLock2(true, mutex);
t1.start();
t2.start();
t3.start();
t1.join();
t2.join();
t3.join();
}
public class FuncLock2 extends Thread {
private Mutex mutex;
private boolean boo;
public FuncLock2(boolean b, Mutex mutex) {
this.boo = b;
this.mutex = mutex;
}
public synchronized void run() {
if (this.boo) {
this.read();
} else {
this.write();
}
}
private void read() {
mutex.lock();
try {
System.out.println(Thread.currentThread().getName() + " read lock ing...");
for (int i = 0; i < 5; i++) {
System.out.println(mutex.sync.getQueuedThreads());
Thread.sleep(1000);
}
} catch (Exception e) {
} finally {
System.out.println(Thread.currentThread().getName() + " read lock end...");
mutex.unlock();
}
}
private void write() {
mutex.lock();
try {
System.out.println(Thread.currentThread().getName() + " write lock ing..");
for (int i = 0; i < 5; i++) {
System.out.println(mutex.sync.getQueuedThreads()); //打印当前队列中的数据
Thread.sleep(1000);
}
} catch (Exception e) {
} finally {
System.out.println(Thread.currentThread().getName() + " write end ing..");
mutex.unlock();
}
}
}
}
运行结果
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23Thread-0 write lock ing..
[Thread[Thread-1,5,main]]
[Thread[Thread-2,5,main], Thread[Thread-1,5,main]]
[Thread[Thread-2,5,main], Thread[Thread-1,5,main]]
[Thread[Thread-2,5,main], Thread[Thread-1,5,main]]
[Thread[Thread-2,5,main], Thread[Thread-1,5,main]]
Thread-0 write end ing..
Thread-1 read lock ing...
[Thread[Thread-2,5,main]]
[Thread[Thread-2,5,main]]
[Thread[Thread-2,5,main]]
[Thread[Thread-2,5,main]]
[Thread[Thread-2,5,main]]
Thread-1 read lock end...
Thread-2 read lock ing...
[]
[]
[]
[]
[]
Thread-2 read lock end...
Process finished with exit code 0上面这段代码,使用自建的独占式锁,根据不同的场景进行读写操作(同时只允许读和写,上面的结果也是证明了同时启动多个线程,同时只有一个线程在运行)。 查看Mutex的具体实现其实就是依赖于Mutex中的sync(队列同步器,继承AQS)。这就引出了本篇文章要详细剖析的AQS.
什么是AQS
AQS(AbstractQueueSynchronizer) 队列同步器,是构建锁或其他同步组件的基础框架,使用一个int成员变量表示同步状态,通过内置的FIFO队列来完成线程获取资源的排队工作。
主要的接口(主要作用是保证状态的改变是安全的)
整形变量
1
2// volatile修饰.
private volatile int state;同步队列 != 等待队列(Condition实现)
getState() 获取状态 (AQS实现)
1
2
3
4
protected final int getState() {
return state;
}setState(int newStatus) 设置状态 (AQS实现)
1
2
3
4// 注意:虽然volatile在某一定情况下不是线程安全的(++i/i++),但是下面的操作是线程安全的
protected final void setState(int newState) {
state = newState;
}compareAndSetState(int expect, int update) CAS操作设置状态 (AQS实现)
1
2
3
4protected final boolean compareAndSetState(int expect, int update) {
// See below for intrinsics setup to support this
return unsafe.compareAndSwapInt(this, stateOffset, expect, update);
}
AQS内部的数据结构
当前线程获取同步状态失败时,同步器会将当前线程以及等待状态等信息构造成一个节点(Node),并将节点加入到队列中,同时会阻塞当前线程。当同步状态被释放时,会将首节点中的线程唤醒,使其再次尝试获取同步状态。所以同步器在实现中涉及到一个节点信息为Node的双向FIFO队列。
- Node
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75static final class Node {
// 标记节点信息是共享同步状态节点,还是独享状态节点
static final Node SHARED = new Node();
// 标记节点信息是共享同步状态节点,还是独享状态节点
static final Node EXCLUSIVE = null;
/** 等待状态: 由于同步队列中等待的线程等待超时或者被中断,需要从同步队列中取消等待,节点进入该状态将不会变化 */
static final int CANCELLED = 1;
/** 等待状态:后续节点的线程处于等待状态。如果当前线程释放了同步状态或者被取消,将会通知后续节点线程运行。 所以signal 都是后继节点设置的*/
static final int SIGNAL = -1;
/** 节点在等待队列中,等待某一个condition触发。当其他线程调用了condition的signal方法后,该节点将会从等待队列移动到同步队列中,加入到对同步状态的获取中 */
static final int CONDITION = -2;
/**
* 标识下一次共享式同步状态获取将会无条件被传播下去
* unconditionally propagate
*/
static final int PROPAGATE = -3;
/**
等待状态,只有CANCELLED.SIGNAL.CONDITION.PROPAGATE.INITIAL(初始为0)
*/
volatile int waitStatus;
/**
* 前驱节点(检查其等待状态),入队前指定并且出队前置为null(gc).
*/
volatile Node prev;
/**
* 后继节点 默认Null
*/
volatile Node next;
/**
* 入队前的线程,并且出队后为null
*/
volatile Thread thread;
/**
* 链接到等待队列中的节点,或者是节点类型(独占或者共享)。意思就是节点类型和等待队列中的后继节点共用一个字段。
*
* 因为只有独占同步状态模式的时候才有条件队列???
*/
Node nextWaiter;
/**
* Returns true if node is waiting in shared mode.
*/
final boolean isShared() {
return nextWaiter == SHARED;
}
/** 获取前驱节点
*/
final Node predecessor() throws NullPointerException {
Node p = prev;
if (p == null)
throw new NullPointerException();
else
return p;
}
Node() { // Used to establish initial head or SHARED marker
}
Node(Thread thread, Node mode) { // Used by addWaiter 共享模式?
this.nextWaiter = mode;
this.thread = thread;
}
Node(Thread thread, int waitStatus) { // Used by Condition // 独占模式?
this.waitStatus = waitStatus;
this.thread = thread;
}
}
独占式同步状态的获取与释放
获取。
1、多个节点等待获取状态时的队列
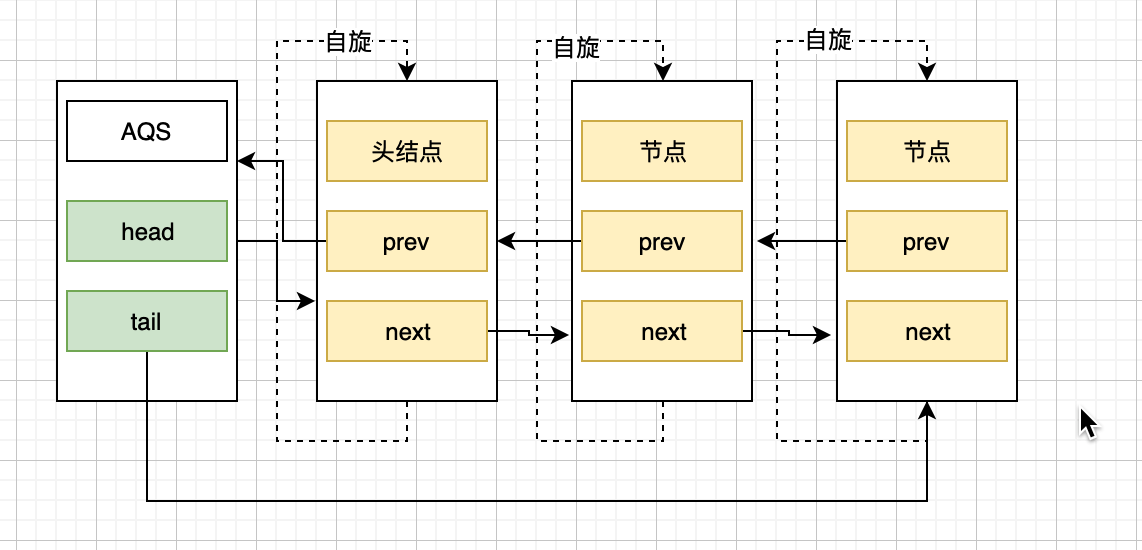
2、自旋的逻辑见下图
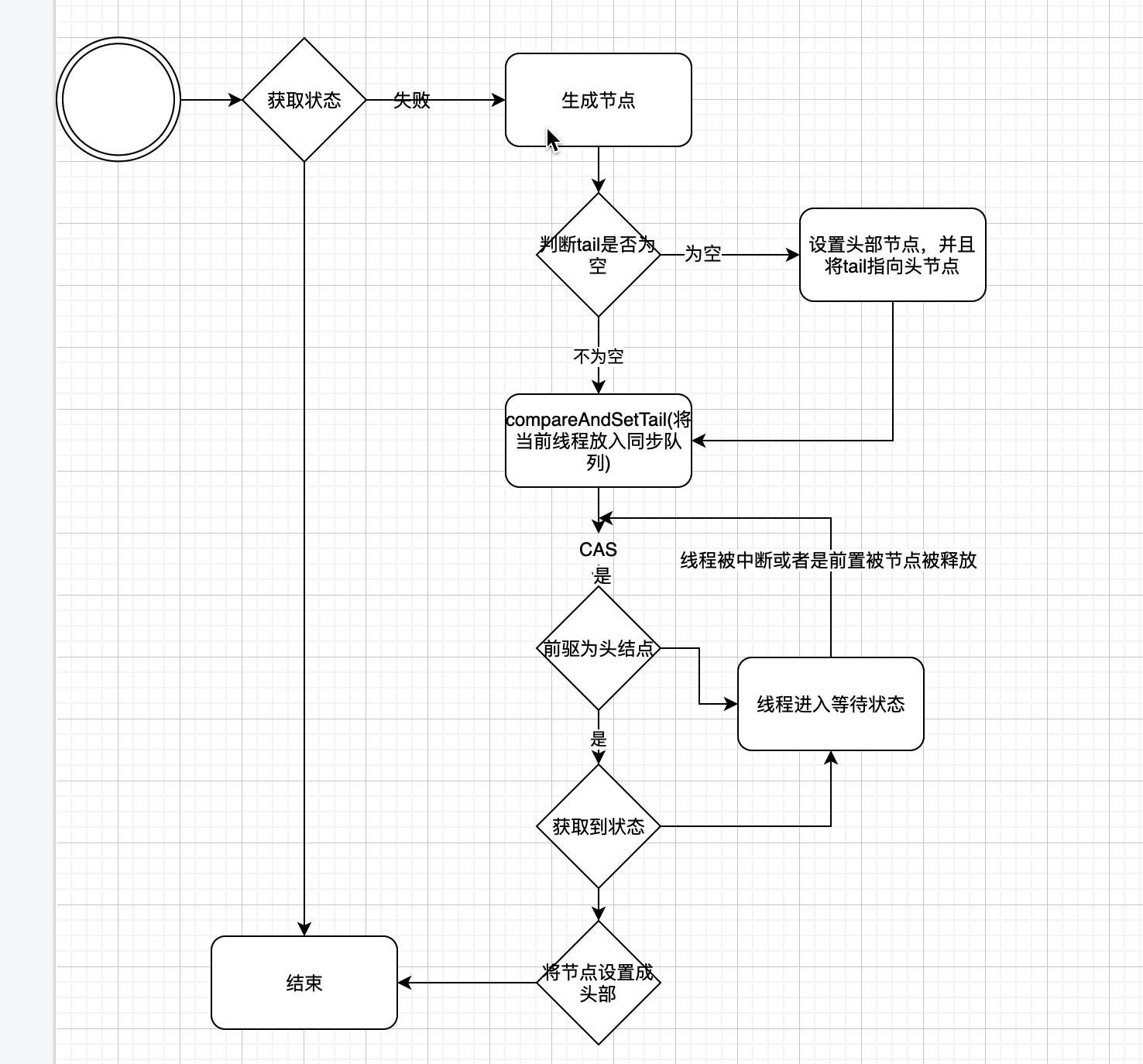
通过acquire()获取同步状态
- tryAcquire先尝试获取状态,如果没有获取到状态则调用acquireQueued将当前线程放入同步队列中。
其中tryAcquire是一个线程安全的获取获取同步状态的函数。
Node.EXCLUSIVE表示是独占式模式1
2
3
4
5public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
addWaiter是构建节点信息。
1 | /** |
enq 将节点插入到队列中
1 | /** |
acquireQueued 自旋查询是否可以获取到锁
1 | // 自旋查询是否可以获取到锁 |
shouldParkAfterFailedAcquire 检查以及修改前驱节点
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
// 这里用到了
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
int ws = pred.waitStatus;
if (ws == Node.SIGNAL)
/*
* 如果前驱节点是signal 那么释放的时候要唤醒后继节点。已经唤醒了,所以直接返回true 即可
*/
return true;
if (ws > 0) {
/*
* >0 就是被取消了
* 那么就轮询当前节点的前驱节点,把前驱节点取消的节点都删除掉.
*/
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
} else {
/*
* 前驱节点不是cancell 又不是signal 那就将前驱节点设置成signal 给自己一个闹钟。标识前驱节点OK了,就唤醒本节点
*/
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
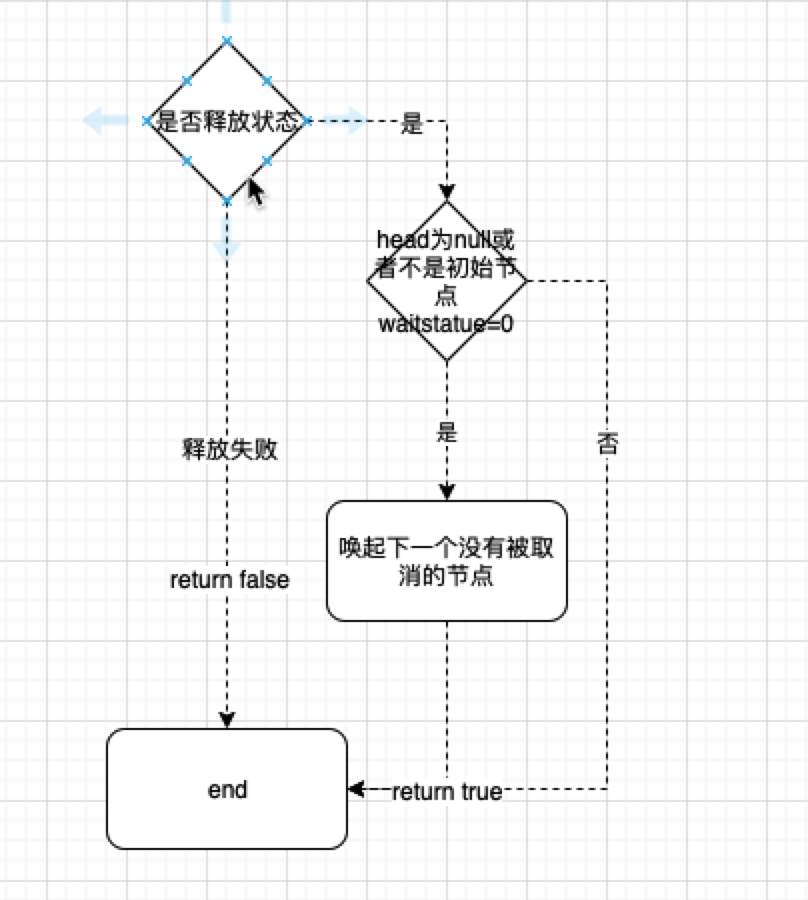
释放
- release()函数
- 由释放锁的子类实现
- unparkSuccessor(h)
- 唤醒后续进程
- 简单逻辑具体见下图
unparkSuccessor 唤醒后续节点
- 唤醒后继等待获取锁的节点
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23private void unparkSuccessor(Node node) {
// 这里如果是1 则是cancel
// 如果是小于0,但是该节点要被唤醒,所以就置为0
int ws = node.waitStatus;
if (ws < 0)
compareAndSetWaitStatus(node, ws, 0);
// 唤醒下一个节点
Node s = node.next;
// 如果下一个节点是null 或者是下一个节点waitStatus>0(被取消)
if (s == null || s.waitStatus > 0) {
s = null;
// 则从tail 找到最近的没有被取消的节点
for (Node t = tail; t != null && t != node; t = t.prev)
if (t.waitStatus <= 0)
s = t;
}
// 如果下一个节点不为null,即还在等待锁
if (s != null)
// 唤醒下一个节点
LockSupport.unpark(s.thread);
}
共享式同步状态获取与释放
- 共享同步状态的获取与独占式同步状态的获取稍微有点不一样。独占式释放锁之后才能触发后继节点获取锁。 共享式同步状态可以被多个线程获取所以共享式同步状态在获取和释放的时候,都会唤醒后继节点。简单理解就是当某个线程可以获取到锁的时候,对于独占式就只能该线程释放后其他线程才能获取。共享式在某个线程获取的时候,其他线程有可能也可以获取到锁。
- 如下图(读写锁只是举例)
- 独占式
- 当读(A)获取到锁的时候,读(B)只能等待读(A)释放后才可以
- 共享式
- 当读(A)获取到锁的时候,读(B)可以同时获取到锁
- 当读取到写(C) 则只能写(C) 单独占据
- 当读(D)获取到锁的时候,读(E)可以同时获取到锁
- 独占式

获取
- 这里需要注意的是,在轮询当前锁获取到的时候,需要通知其他等待获取锁的节点尝试获取锁
- 看下图
- 代码详解
acquireShared 尝试获取共享锁
1
2
3
4
5
6
7
8
9// 获取
public final void acquireShared(int arg) {
// tryAcquireShared(arg) <0 的时候表示没有获取到同步状态,调用doAcquireShared进行CAS获取状态。
// val = tryAcquireShared(arg) >= 0 则表示获取到的同步状态
// val 大于0 表示当前线程获取共享锁成功,并且接下来其他线程尝试获取共享锁的行为可以成功(可能)
// val 等于0.表示当前线程获取共享锁成功,但是接下来其他线程尝试获取共享锁会失败
if (tryAcquireShared(arg) < 0)
doAcquireShared(arg);
}
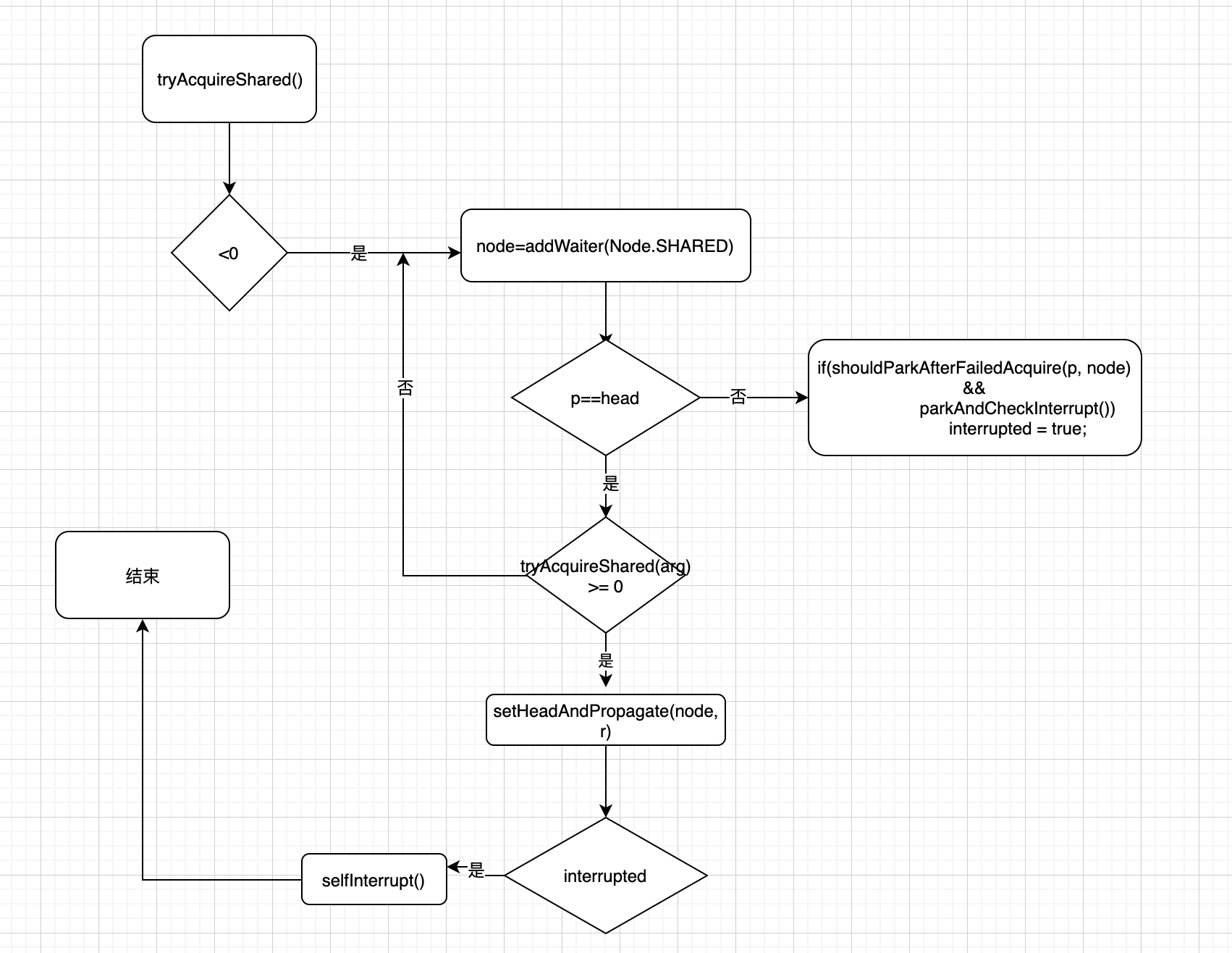
doAcquireShared 自旋获取锁
- 如果当前节点的前驱节点是头部节点,并且tryAcquireShared(arg) >= 0,则表示获取到了同步状态,设置当前节点为head,并且通知其他可以获取到锁的节点获取锁
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32private void doAcquireShared(int arg) {
// addWaiter(Node.SHARED)只是标记是共享式的
final Node node = addWaiter(Node.SHARED);
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
// 获取前置节点
final Node p = node.predecessor();
if (p == head) {
// 如果前置节点是Head
int r = tryAcquireShared(arg);
//并且可以获取到锁
if (r >= 0) {
// 设置当前节点为head,通知其他节点获取锁
setHeadAndPropagate(node, r);
p.next = null; // help GC
if (interrupted)
selfInterrupt();
failed = false;
return;
}
}
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
cancelAcquire(node);
}
}
setHeadAndPropagate 通知后继节点获取锁
1 | // 这里是setHead 以及共享式是否通知其他等待获取锁的节点获取锁 |
释放
releaseShared
- 注意这里,释放成功之后,也是要通知后继的节点获取锁
1
2
3
4
5
6
7public final boolean releaseShared(int arg) {
if (tryReleaseShared(arg)) {
doReleaseShared();
return true;
}
return false;
}
doReleaseShared
- 通知可以获取到锁的其他节点(核心)
- 这里注意两个if
- 以及第二个if里面的compareAndSetWaitStatus(h, 0, Node.PROPAGATE)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30// 通知可以获取到锁的其他节点。
// 只有当(h==head)时候才会终止. 标识所有可以获取到锁的节点都已经获取到锁了
private void doReleaseShared() {
for (;;) {
Node h = head;
if (h != null && h != tail) {
int ws = h.waitStatus;
if (ws == Node.SIGNAL) {
// 如果当前节点是signal, 因为已经可以获取到锁(doAcquire)或者是释放掉锁(release), 所以都可以将当前节点的status 设置成为0. 如果没有设置成功,跳过。
if (!compareAndSetWaitStatus(h, Node.SIGNAL, 0))
continue; // loop to recheck cases
// 如果设置成功,其实就是需要唤醒后继节点了
unparkSuccessor(h);
}
// ws == 0 并且是至少两个节点,
// ws== 0 有下面几种分析:
// 1 多线程情况下,某个线程上面的compareAndSetWaitStatus(h, Node.SIGNAL, 0) 成功(注意这种情况是多个节点的head都是这个head). 这种情况不可能出现的。因为doReleaseShare的大前提是当前节点就是前置节点是可以获取到锁的。前置节点可以获取到锁,其实就是前驱节点已经是head.多个线程操作,不会同时获取到同一个head.
// 2 当头结点刚创建的时候,status为0.尾结点已经追加进来,需要执行shouldParkAfterFailedAcquire将head的waitStatus设置为signal.但是还没有执行,所以会有ws==0.
else if (ws == 0 &&
// !compareAndSetWaitStatus(h, 0, Node.PROPAGATE) 当h的waitStatus不是0的时候,说明h.waitStatus被改了。说明之前的shouldParkAfterFailedAcquire已经执行了,所以需要continue.
// 如果compareAndSetWaitStatus(h, 0, Node.PROPAGATE)成功了,对于上文的setHeadAndPropagate,中有```|| h == null || h.waitStatus < 0 || (h = head) == null || h.waitStatus < 0``` h.waitStatus < 0.
(h = head) == null || h.waitStatus < 0)
!compareAndSetWaitStatus(h, 0, Node.PROPAGATE))
continue; // loop on failed CAS
}
if (h == head) // loop if head changed
break;
}
}